Research on Complex Environment Adaptation Technology and Its Algorithm for Intelligent Networked Vehicles
und
17. März 2025

Über diesen Artikel
Online veröffentlicht: 17. März 2025
Eingereicht: 17. Okt. 2024
Akzeptiert: 26. Jan. 2025
DOI: https://doi.org/10.2478/amns-2025-0192
Schlüsselwörter
© 2025 Fan Luo et al., published by Sciendo
This work is licensed under the Creative Commons Attribution 4.0 International License.
Figure 1.
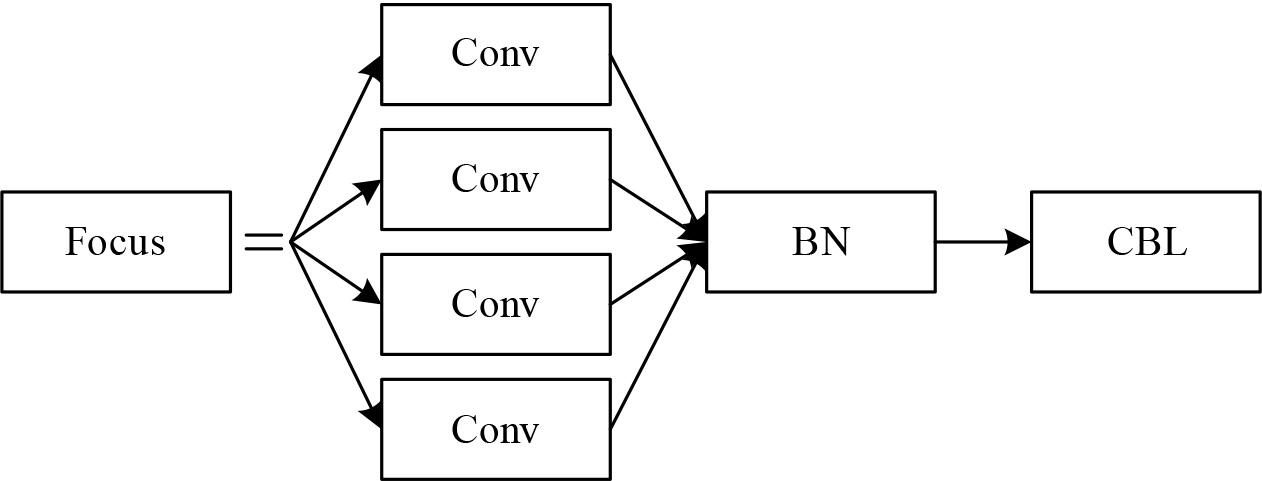
Figure 2.
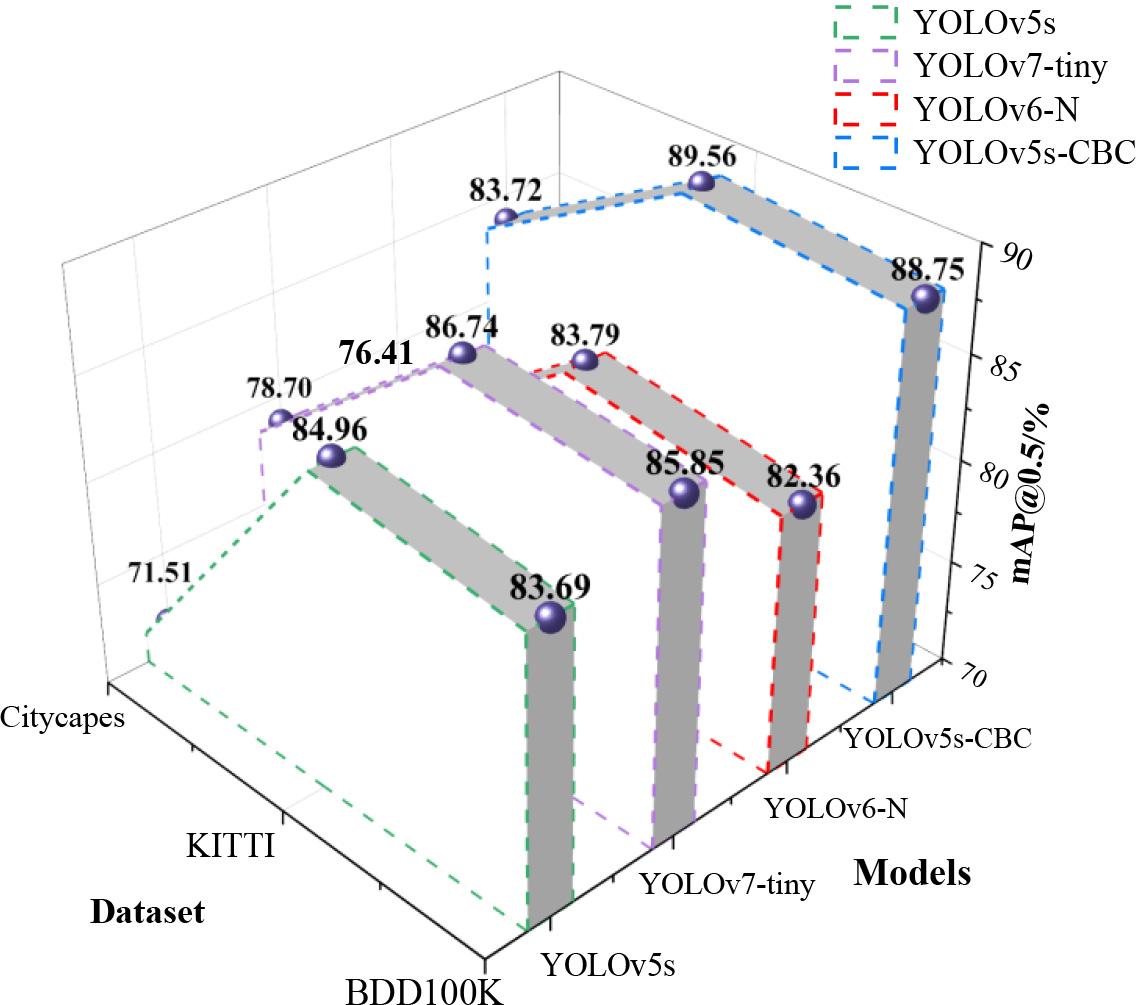
Figure 3.
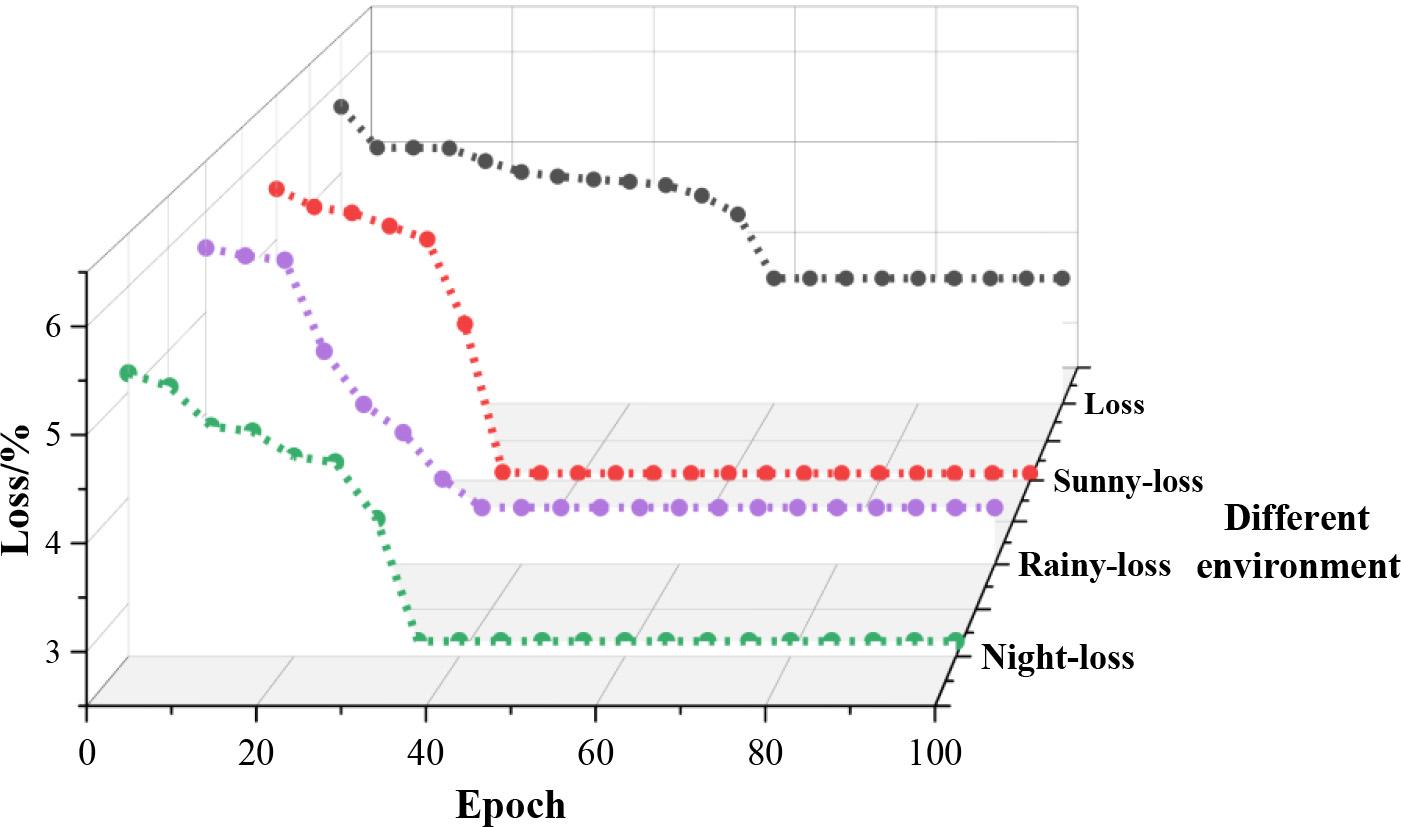
Figure 4.
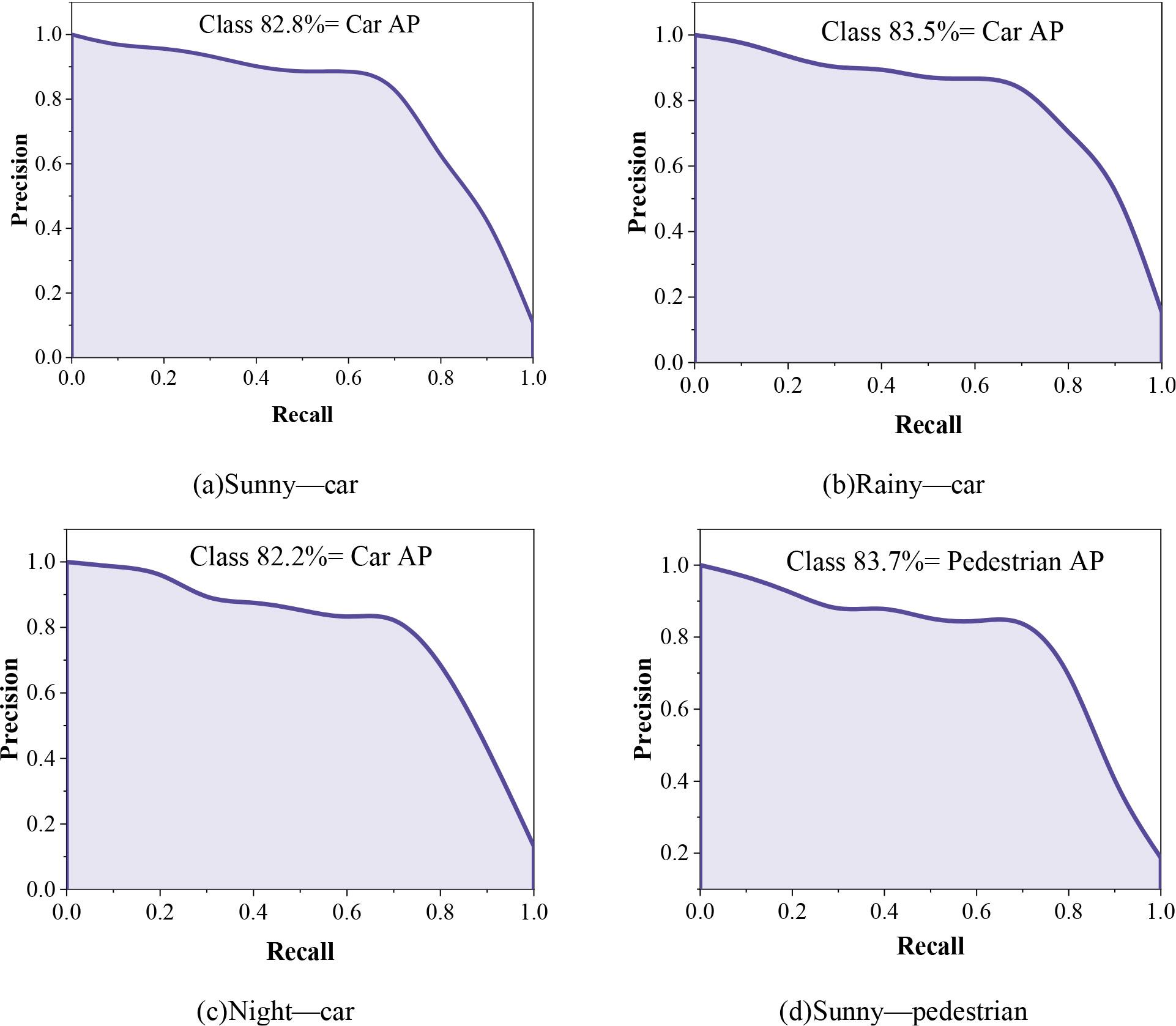
Figure 5.
Test results of YOLOv5s model on BDD100K dataset
| Class | Images | Labels | P/% | R/% | mAP@0.5/% |
|---|---|---|---|---|---|
| All | 4000 | 10399 | 84.27 | 83.93 | 85.05 |
| Car | 1000 | 9321 | 92.57 | 90.18 | 91.95 |
| Truck | 1000 | 254 | 85.92 | 81.62 | 83.69 |
| Pedestrian | 1000 | 372 | 86.53 | 87.20 | 84.33 |
| Cyclist | 1000 | 452 | 83.85 | 85.15 | 82.79 |
Test results of YOLOv5s-CBC model on BDD100K dataset
| Class | Images | Labels | P/% | R/% | mAP@0.5/% |
|---|---|---|---|---|---|
| All | 4000 | 10399 | 89.42 | 88.9 | 90.68 |
| Car | 1000 | 9321 | 95.61 | 94.08 | 93.59 |
| Truck | 1000 | 254 | 90.92 | 88.52 | 87.64 |
| Pedestrian | 1000 | 372 | 89.43 | 91.75 | 89.59 |
| Cyclist | 1000 | 452 | 86.47 | 89.61 | 86.61 |