Optimisation of highway vehicle occlusion recognition based on attention and multitasking approach
17 mar 2025

Acerca de este artículo
Publicado en línea: 17 mar 2025
Recibido: 18 oct 2024
Aceptado: 12 feb 2025
DOI: https://doi.org/10.2478/amns-2025-0180
Palabras clave
© 2025 Shifeng Feng, published by Sciendo
This work is licensed under the Creative Commons Attribution 4.0 International License.
Figure 1.
Figure 2.
Figure 3.
Figure 4.
Figure 5.
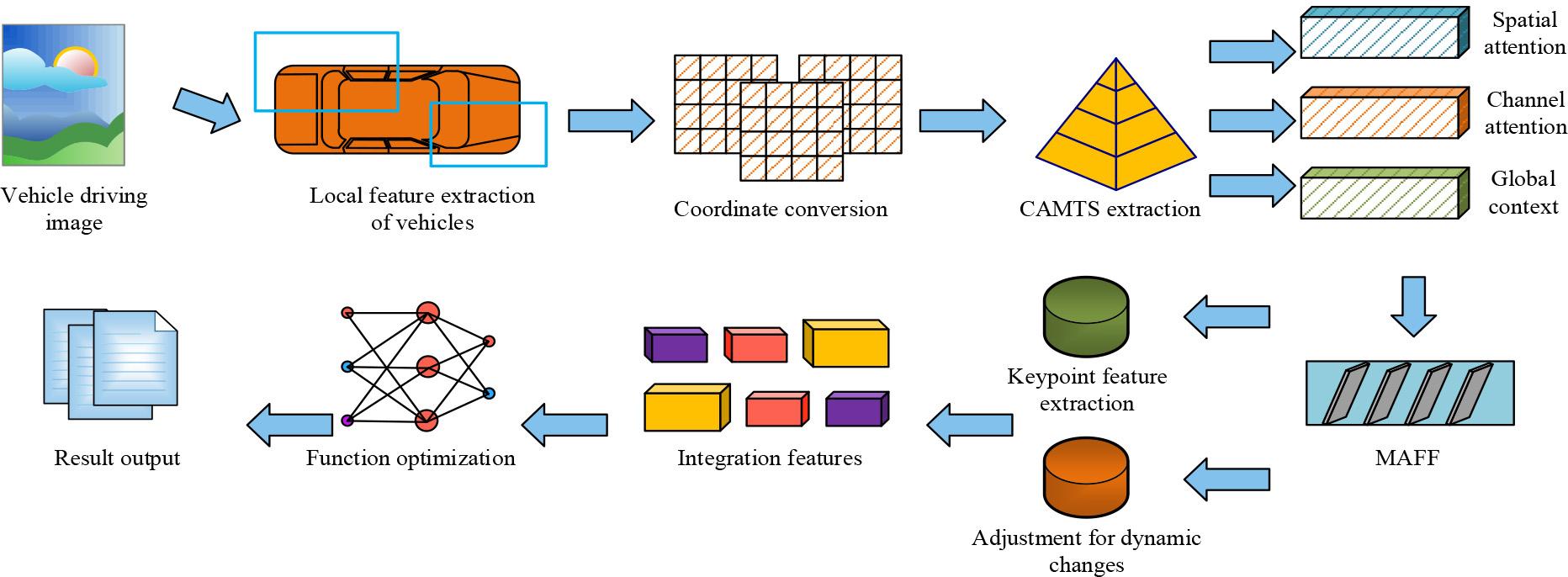
Figure 6.
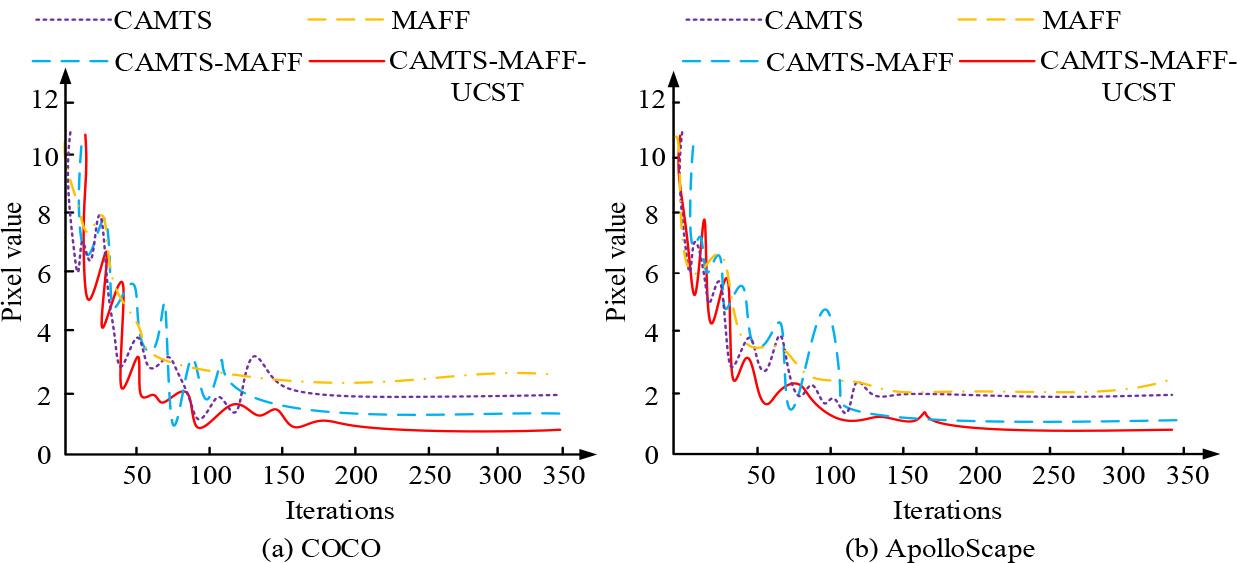
Figure 7.
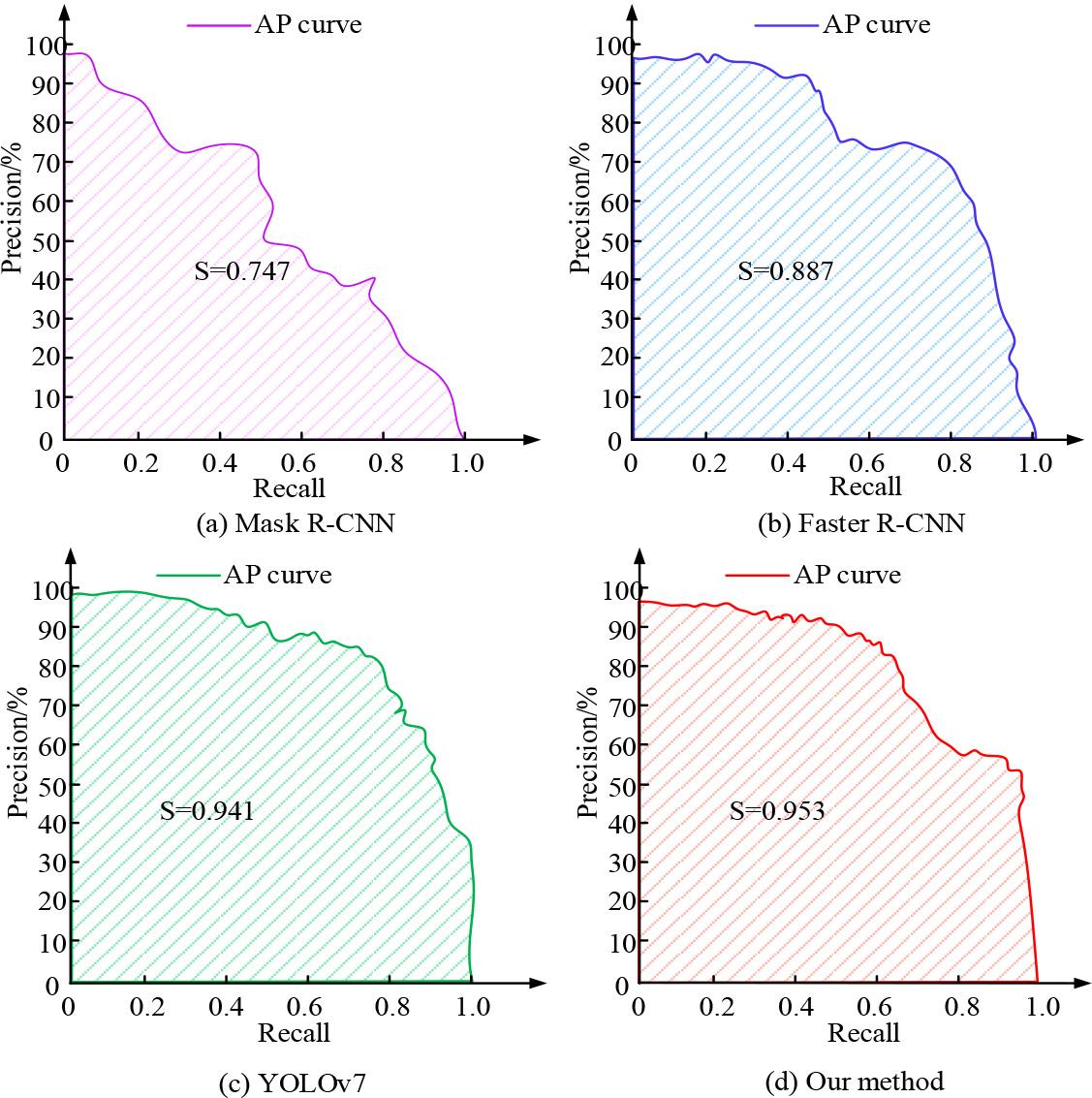
Figure 8.
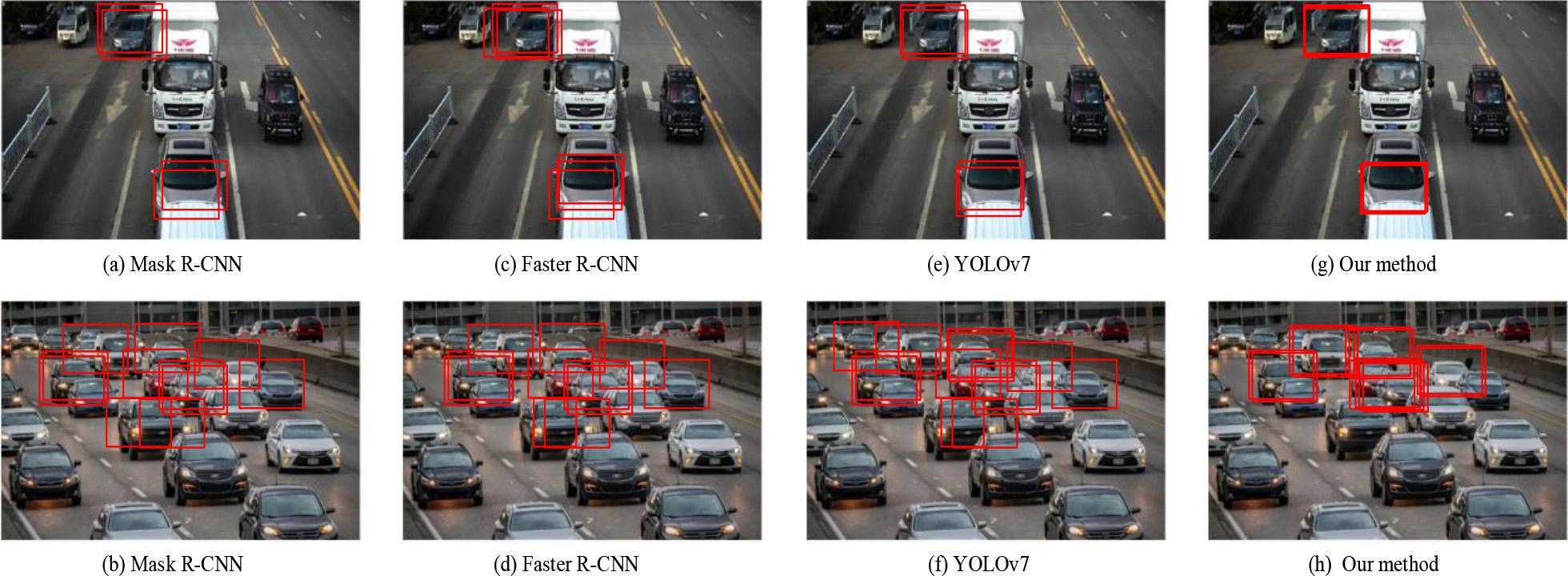
Comparison of different methods for detecting occluded vehicles
| Data set | Model | P/% | R/% | F1/% | MSE | MAE |
|---|---|---|---|---|---|---|
| COCO | Mask R-CNN | 79.33 | 82.29 | 80.81 | 0.04 | 0.06 |
| Faster R-CNN | 84.69 | 84.17 | 84.43 | 0.02 | 0.04 | |
| YOLOv7 | 89.75 | 88.74 | 89.32 | 0.02 | 0.02 | |
| Our method | 93.28 | 92.47 | 92.82 | 0.01 | 0.02 | |
| ApolloScape | Mask R-CNN | 84.25 | 86.54 | 85.41 | 0.03 | 0.06 |
| Faster R-CNN | 86.69 | 88.15 | 87.36 | 0.03 | 0.05 | |
| YOLOv7 | 89.51 | 90.33 | 89.51 | 0.03 | 0.04 | |
| Our method | 92.23 | 93.82 | 92.62 | 0.01 | 0.02 |
Comparison of model detection results under different occlusion conditions
| Occlusion rate | Method | Color precision/% | Vehicle type precision/% | Detection time/s |
|---|---|---|---|---|
| 20% | Mask R-CNN | 79.08 | 87.22 | 1.04 |
| Faster R-CNN | 76.33 | 72.23 | 1.46 | |
| YOLOv7 | 82.81 | 73.52 | 1.22 | |
| Our method | 91.74 | 93.49 | 0.29 | |
| 40% | Mask R-CNN | 80.13 | 79.45 | 0.93 |
| Faster R-CNN | 75.62 | 86.51 | 0.77 | |
| YOLOv7 | 82.77 | 89.52 | 0.61 | |
| Our method | 90.06 | 89.06 | 0.44 | |
| 60% | Mask R-CNN | 80.45 | 80.94 | 0.55 |
| Faster R-CNN | 83.92 | 78.25 | 1.94 | |
| YOLOv7 | 76.76 | 83.49 | 0.74 | |
| Our method | 94.56 | 88.67 | 0.21 | |
| 80% | Mask R-CNN | 78.77 | 81.47 | 1.28 |
| Faster R-CNN | 82.36 | 84.22 | 1.18 | |
| YOLOv7 | 84.58 | 87.11 | 1.92 | |
| Our method | 92.52 | 88.16 | 0.53 |